
DeltaHand: A Low-Cost Dexterous Robotic Hand
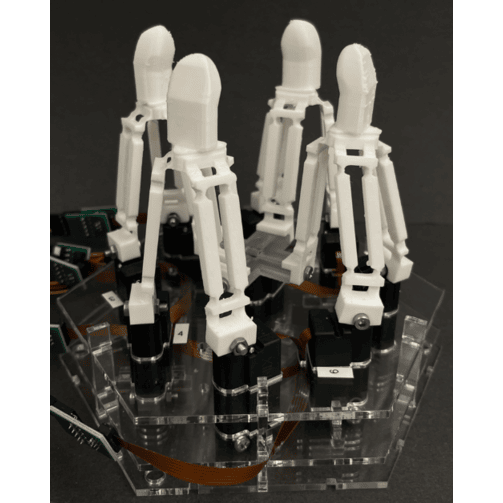
I contributed to the development of a low-cost 3D-printable robotic hand using delta robots as fingers in the Zoom Lab at Carnegie Mellon University, led by PhD student Zilin Si. Each finger uses three linear actuators to control fingertip position in x, y, and z.
Software & Control
I wrote the Python control stack running on a Raspberry Pi, implementing inverse kinematics to translate desired fingertip positions into actuator commands. The system originally relied on camera input and IK alone — once the finger made contact, there was no feedback.
Force Sensing Integration
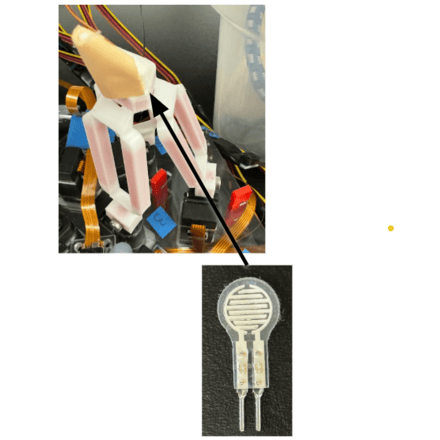
I integrated embedded force sensors at each fingertip to enable real-time closed-loop tactile manipulation. This allows the hand to detect contact, regulate grip pressure, prevent slipping, and avoid crushing objects. I selected a resistive force sensor, positioned it to measure only contact forces (not structural deformation), and characterized its readings against an external load cell. With sensing in place, I developed a PID-based feedback controller to dynamically adjust grip strength.
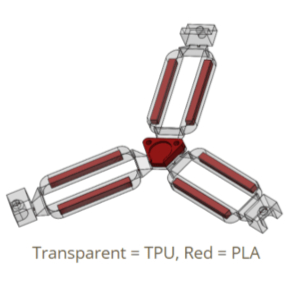
Structural Design
I also contributed to the structural design of the delta fingers — single-piece 3D prints combining TPU for compliant joints and PLA for stiffness. These materials have similar melting temperatures but different elastic properties, enabling a multi-material print that simplified manufacturing while maintaining performance.
The result was a functional, low-cost robotic hand capable of grasping objects with real-time force feedback — a simpler, more adaptive approach to dexterous manipulation.