
DeltaHand: A Dexterous Hand Using Delta Robots
I contributed to the development of a cost-effective robotic hand that leverages 3D-printed delta robots for dexterous manipulation. This project, led by a PhD student in the Zoom Lab at Carnegie Mellon University, Zilin Si, aimed to create a simplified and modular alternative to traditional robotic hands, which are often expensive and complex to manufacture.
Tactile Sensing
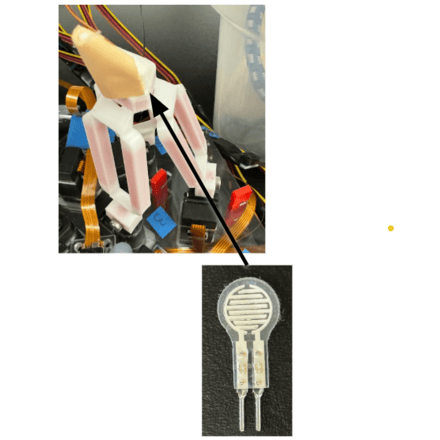
A key focus of my work was integrating force sensing and feedback control to improve grasping precision and adaptability in real-world applications. The robotic hand originally relied solely on a camera and inverse kinematics for object detection and manipulation. However, force sensing significantly enhances a robotic gripper’s capability by allowing it to detect object contact, regulate grip pressure, prevent object slipping, and avoid excessive force that could damage the gripper or objects. I selected and integrated a resistive force sensor into the fingertips, ensuring it measured only contact forces rather than unintended deformations in the robot’s structure. I then worked on calibrating the sensor against an external load cell to characterize its force readings. With force sensing integrated, I developed a PID-based feedback control system to adjust grip strength dynamically. This gave the robot the capability to apply specific amount of pressure onto an object when gripping it.
Structural Design
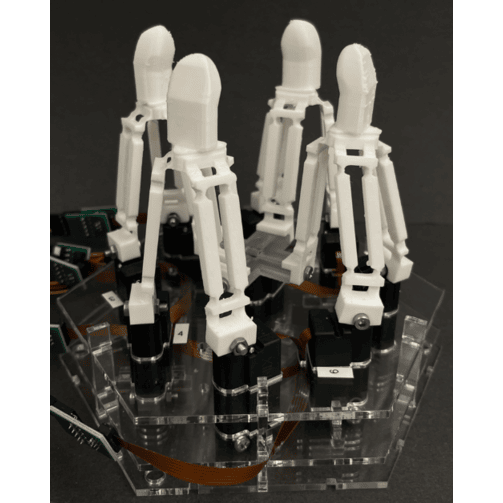
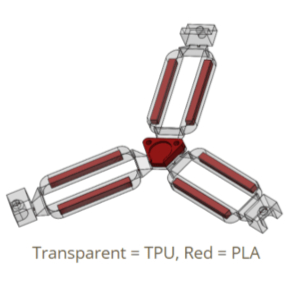
In parallel, I worked on the structural design of the robotic gripper to ensure flexible yet stable joint articulation. The delta fingers were designed as single-piece 3D-printed structures, combining TPU for compliant joints and PLA for structural stiffness. These materials were chosen because they have similar melting temperatures but significantly different elastic properties, allowing for embedded stiffening while maintaining flexibility. Additionally, printing each delta finger as a single unit greatly simplified manufacturing, reducing assembly complexity and improving consistency.
This work resulted in a functional, low-cost robotic hand capable of grasping and manipulating a wide range of objects with improved force sensitivity. By integrating real-time force feedback and optimizing structural design, the project demonstrated a novel approach to simplified, adaptive robotic grasping.